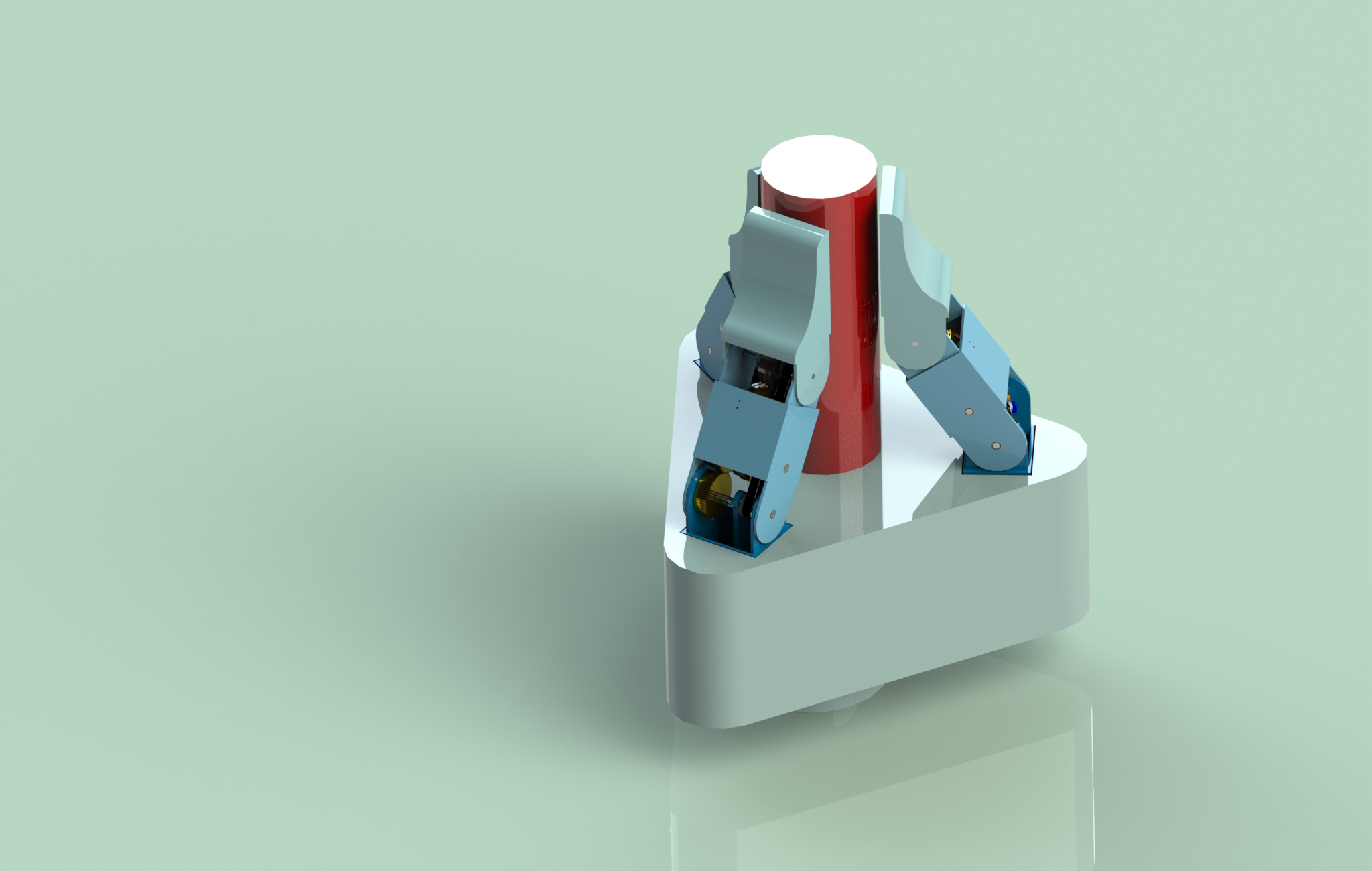




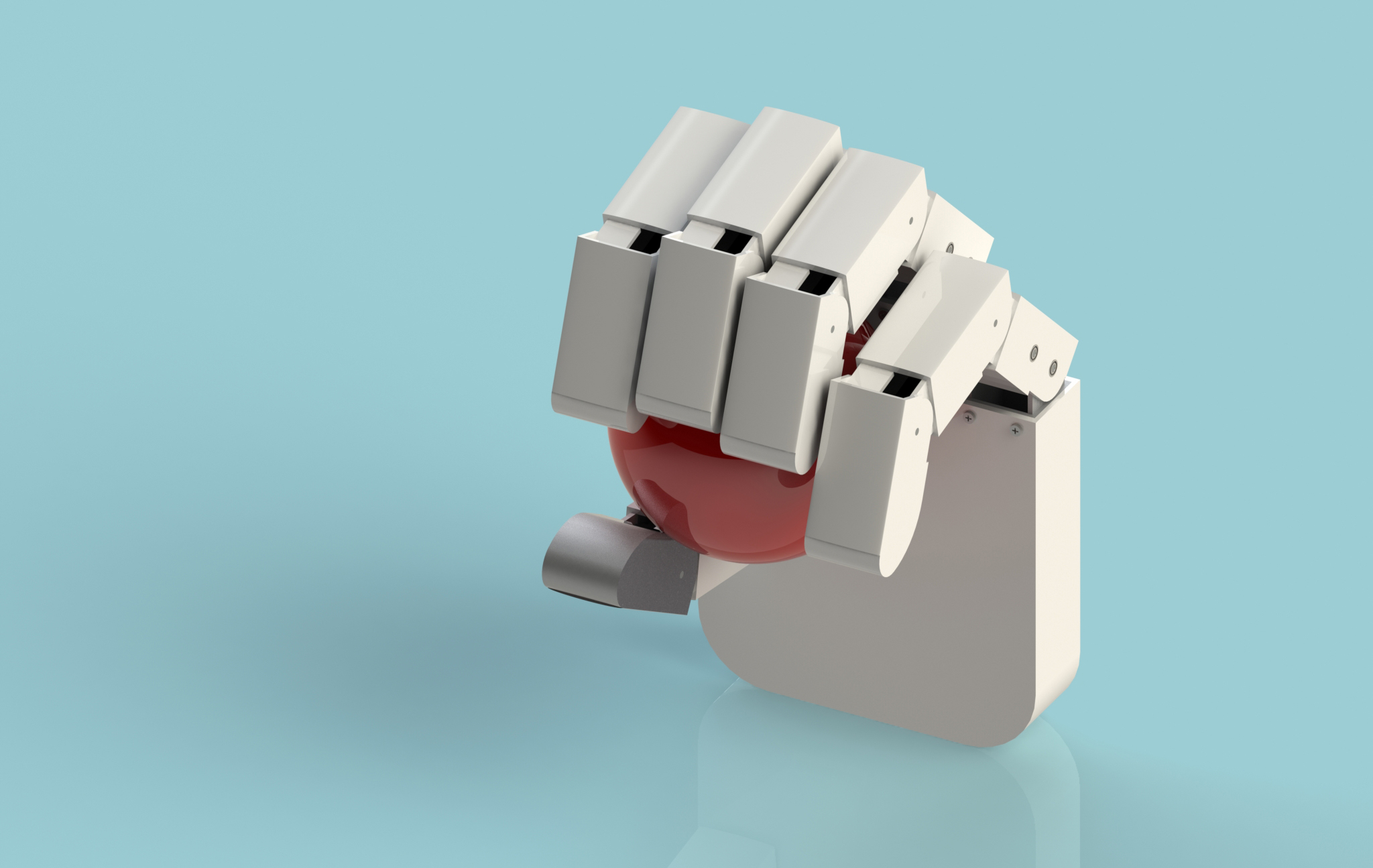
COSA-FBA Underactuated Robot Hand
This is one of my engineering projects when I interned in Advanced Robot Hand Lab at Tsinghua University. This paper proposes a novel underactuated hand, COSA-FBA hand, which performs coupled and self-adaptive grasping.
READ